




Manipulator s spono
Uvod
a) Isti manipulator s trdo roko za pomoč pri sili lahko uravnoteži različne teže od 2 do 500 kg.
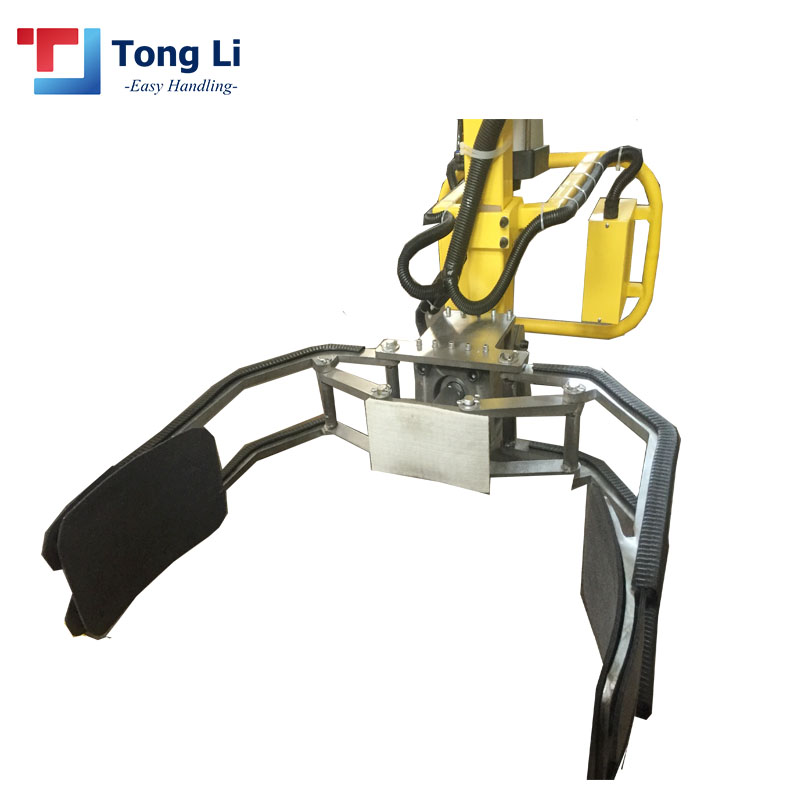
b) Manipulator s pomočjo energije je sestavljen iz ravnotežnega nosilca, prijemalnega elementa in montažne strukture.
c) Gostitelj manipulatorja je glavna naprava, ki uresničuje negravitacijsko lebdeče stanje materialov (ali obdelovancev) v zraku.
d) Manipulator je naprava, ki izvaja prijem obdelovanca in izpolnjuje ustrezne zahteve uporabnika glede ravnanja in montaže.
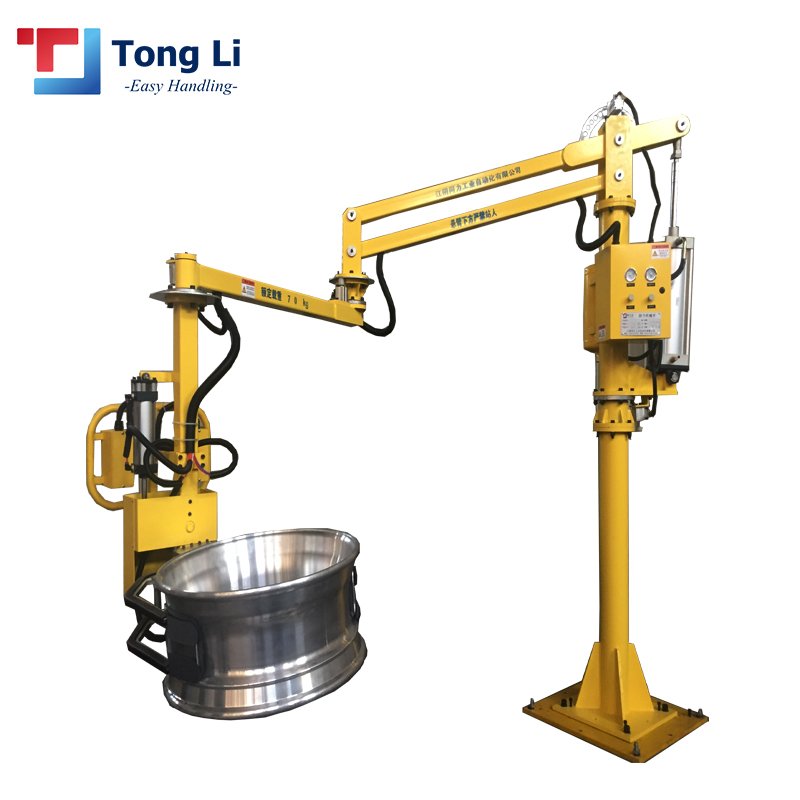
e) Namestitvena struktura je mehanizem, ki podpira celoten sklop opreme glede na območje delovanja uporabnika in pogoje na lokaciji.

| Model opreme | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Zmogljivost | 50 kg | 100 kg | 200 kg | 300 kg |
| Delovni radij | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Višina dviga | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Zračni tlak | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa |
| Kot vrtenja A | 360° | 360° | 360° | 360° |
| Kot vrtenja B | 300° | 300° | 300° | 300° |
| Kot vrtenja C | 360° | 360° | 360° | 360° |






a) Lahko doseže stanje gravitacijskega ravnovesja materialov različnih tež, kar je primerno za natančno prenos materialov.
b) Ko se obdelujejo brez obremenitve, s polno obremenitvijo in različni obdelovanci, lahko sistem zazna spremembo teže in doseže plavajoče stanje obremenitve v tridimenzionalnem prostoru, kar je priročno za natančno pozicioniranje.
c) Značilnosti popolnega ravnovesja, gladkega gibanja itd. omogočajo upravljavcu enostavno rokovanje, pozicioniranje in montažo obdelovanca.
d) Toga roka omogoča, da manipulator prenaša obdelovanec čez ovire; horizontalna roka pa lahko izpolnjuje zahteve za horizontalno polaganje in horizontalno odstranjevanje materialov na ustreznih mestih.
e) Sistem lahko vedno vzdržuje nivo glave manipulatorja in zagotavlja visoko stopnjo uporabnosti.
f) Zglobna zavorna naprava z več vrtljivimi zglobi za pobiranje in odlaganje materiala na širokem območju; opremljena z zavorno napravo lahko upravljavec kadar koli med delovanjem prekine gibanje manipulatorja.



Ta vrsta električnega manipulatorja lahko dvigne obdelovanec z nosilnostjo do 500 kg. Delovni radij je približno 2500 mm, višina dviga pa približno 1500 mm. Glede na težo dvignjenega obdelovanca je treba izbrati najmanjši tip stroja glede na največjo težo obdelovanca. Če uporabimo manipulator z največjo nosilnostjo 200 kg za prenašanje 30 kg obdelovanca, potem delovanje zagotovo ni dobro, saj se zdi zelo težek. Oprema je standardno opremljena z rezervoarjem za zrak, ki lahko še vedno opravi delovni cikel, tudi če dovod plina preneha delovati. Hkrati bo sprožil alarm, ki bo opomnil upravljavca. Ko zračni tlak pade do določene mere, se bo sprožila funkcija samodejnega zaklepanja, da se prepreči padec obdelovanca. Manipulator z varnostnim sistemom med rokovanjem ali če obdelovanec ni nameščen na varnem mestu, upravljavec ne more sprostiti obdelovanca. Z različnimi nestandardnimi vpenjali lahko električni manipulator s trdo roko enostavno izvede različne procesne operacije.





